沃尔沃计划率先在量产汽车上安装LiDAR
自动驾驶汽车需要看看世界,就像我们人类司机偶尔会从手机上抬起头来用雨刷偷看前面的大车窗一样。目前,所有具有半自动驾驶功能的量产汽车(请记住,今天没有完全自动驾驶的汽车出售)都使用可见光摄像头和大量的计算能力来处理图像。其他技术,如LiDAR(光方向和测距)已经存在,并已在原型AV上使用,但到目前为止还没有在量产汽车上使用过。看起来沃尔沃正计划改变这一点。
激光雷达是一项有趣的技术;如果你忘记了它的全部内容,让我引用我们对自动汽车传感技术的简要介绍来提醒你:
激光雷达使用低强度、无害和不可见的激光束(对于我们肉眼来说),这些激光束被脉冲照射到一个目标上(或者,对于大多数自动驾驶汽车,周围是一个完整的360°圆顶),反射的脉冲被测量返回时间和波长,以计算物体与发送者的距离。
在实践中,激光雷达可以生成一些非常详细的、高分辨率的自动驾驶汽车周围环境的可视化效果。你可以在上面看到这个是什么样子的。
令人印象深刻,对吧?激光雷达通常足够详细,可以分辨出过往汽车的不同表面纹理和相当小的细节,甚至可以分辨出道路上的坑洞和井盖。
激光雷达没有在生产车辆上使用,主要有两个原因:第一,这项技术非常昂贵,也许更重要的是,车顶上有看起来笨重的大圆顶的汽车真的很难销售。
埃隆·马斯克(Elon Musk)对LiDAR不屑一顾,并称其丑陋,这是出了名的,但它确实提供了一些非常令人印象深刻的360度传感技术,真的不值得解雇。
沃尔沃已经投资了一家总部位于佛罗里达州的公司,该公司似乎已经开发出了足够便宜和足够小的LiDAR,可以集成到生产车辆中。
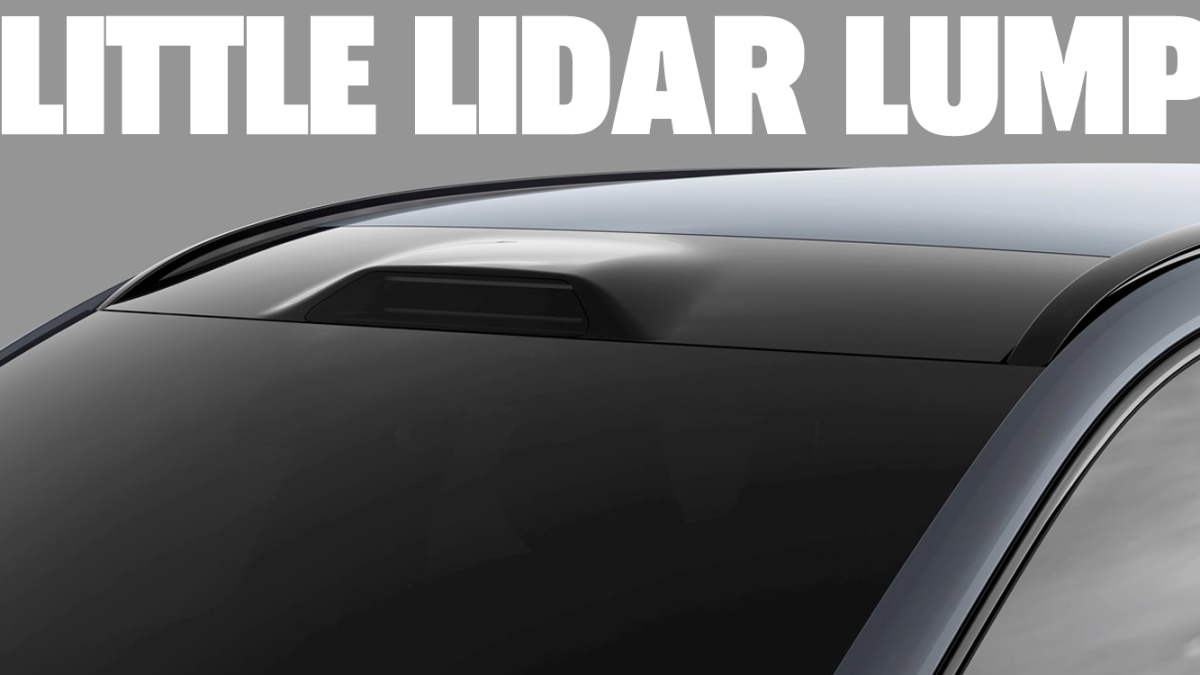
沃尔沃在新闻稿中展示的LiDAR外壳肯定比我见过的任何LiDAR装置都要小,尽管它似乎不能感知360度的全景;也许后面有一个配套的装置,结合起来他们可以全方位地看到这辆车?
沃尔沃宣称的目标是使用该系统实现有效的3级自动驾驶:不需要人工干预,但只在特定的地理围栏区域内进行,在沃尔沃的情况下,这些区域将是高速公路,“经核实,对个别地理位置和条件是安全的”。
沃尔沃称之为高速公路飞行员,这将比目前的二级系统有很大优势,目前的二级系统要求司机准备好在接到通知后立即接手,这是人类臭名昭著的糟糕之处,我在书中花了整整一章来说明这一点。
沃尔沃计划在2022年开始生产集成了这种LiDAR技术的汽车,作为他们即将推出的SP2模块化汽车架构的一部分。
更多的传感器对自动驾驶汽车来说总是更好的,而LiDAR提供了很多巨大的潜力。对于一项昂贵而笨重的技术来说,这可能是一个重大突破,所以我很好奇这一切会有多好的结果。
高级编辑,Jalopnik·正在运行:1973 VW Beetle,2006 Scion xB,1990 Nissan Pao,1991 Yugo GV Plus·不那么运行:1973 Reliant Scimitar,1977 Dodge Tioga RV(也请购买我的书!)