用树莓派模拟波士顿动态
2020-08-14 22:49:53
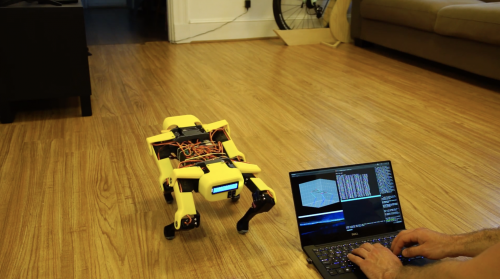
这是一个在覆盆子皮3B上运行的“Spot Micro”步行四足机器人。通过构建这个项目,rededitor/thetrueonion(又名Mike)想自学C++和Python的机器人软件开发,让机器人行走,并掌握速度和方向控制。
迈克的灵感来自于波士顿动力公司为工业开发的机器人之一Spot,用于执行远程操作和自主传感。
UBEC:HKU5 5V/5A ubec,用作5V电压调节器,为树莓PI、LCD面板、PCA9685控制板供电。
迷你“Spot Micro”机器人通过键盘摇摆三轴角度指令/身体姿势控制模式,可以实现“快步步态”或“行走步态”。前者是一种四相步态,两条腿同时对称运动(就像小跑的马)。后者是一种八阶段步态,一次摆动一条腿,身体在两条腿之间移动以保持平衡(就像人类走路一样)。
迈克分析了他们是如何让机器人行走的,精确到伺服系统需要连接到PCA9685控制板的顺序,在这个广泛的演练中。
是的,这是一个神奇的项目,您需要的所有代码都存储在GitHub上。该软件是在运行Ubuntu16.04的Raspberry PI 3B上实现的。它由ROS框架中的C++和Python节点组成。
迈克还没有完成:他们希望通过结合激光雷达来实现简单的房间2D映射来改进他们的黄色野兽。名单上还包括开发一个自主运动规划模块,以引导机器人在感知到的2D环境中执行简单的任务。最后,添加一个摄像头或网络摄像头来进行基本的图像分类将使他们的创作更加巧妙。