类型理论和类型检查器的入门指南
到目前为止,在本系列文章中,我们已经研究了梯度下降的一般原理,以及如何计算前馈神经网络中每一层的反向传播,然后概括了一下CNN中不同类型层的反向传播。
现在,我们将退后一步,从更一般的意义上来看反向传播-通过计算图。通过这一过程,我们将大致了解框架如何计算其
我们将使用LSTM单元作为激励示例-继续对IMDB评论数据集进行情感分析-您可以在随附的Jupyter笔记本中找到代码
让我们回顾一下本系列中使用的原理:
偏导数的直觉:宽松地思考∂y x \ frac {\ partial {y}} {\ partial {x}}∂x y∂量化如果给xxxa一点“轻推”的值,yyy会改变多少。在那时候。
分解计算-我们可以使用链式规则来帮助我们进行计算-而不是一口气尝试计算导数,而是将计算分解为较小的中间步骤。
计算链式规则-当考虑要在链式规则表达式中包含哪些中间值时,请考虑涉及x x x的方程的直接输出-当我们稍微推拉x x x时,其他哪些值会直接受到影响?
一次只包含一个元素-我们不用担心整个矩阵A A A,而是关注元素A i j A_ {ij} A i j。我们将一遍又一遍地引用一个方程式:
C i j = ∑ k A i k B k j C = A。 B C_ {ij} = \ sum_k A_ {ik} B_ {kj} \ iff C = A.B C i j = k A i k B k j C = A。乙
尝试从一个元素到矩阵时,一个有用的技巧是在重复索引(此处为k)上求和-这表明矩阵乘法。
C i j = A i j B i j C = A * B C_ {ij} = A_ {ij} B_ {ij} \ iff C = A * B C i j = A i j B i j⟺C = A * B
完好无损地检查尺寸-检查所有匹配的矩阵的尺寸(派生矩阵应具有与原始矩阵相同的尺寸,并且所有相乘在一起的矩阵应具有对齐的尺寸。
计算图使我们可以清楚地分解计算,并在计算链式规则时查看即时输出。
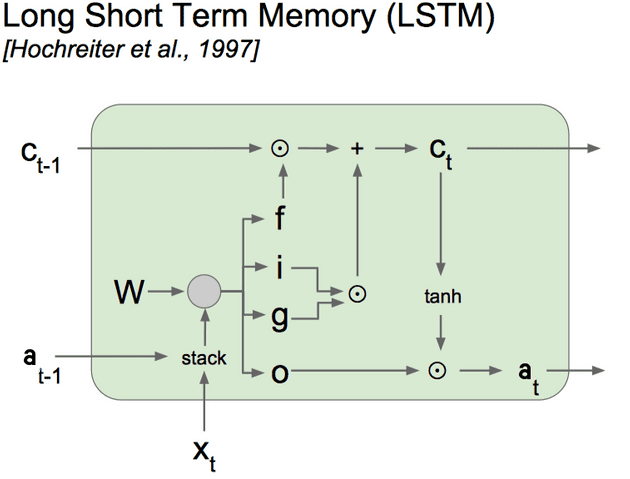
我们将使用LSTM的计算图表示形式(如上所示),通过时间的反向传播来计算梯度。
从上一篇文章开始,LSTM中一个时间步的正向传播方程为:
Γi =σ(W i。[a< t − 1>,x< t>] + bi)\ Gamma_i = \ sigma(W_i。[a ^ {< t-1>},x ^ {< t>}] + b_i)Γi =σ(W i。[a< t − 1>,x< t>] + bi)
Γf =σ(W f。[a< t-1>,x< t>] + bf)\ Gamma_f = \ sigma(W_f。[a ^ {< t-1>},x ^ {< t>}] + b_f)Γf =σ(W f。[a< t − 1>,x< t>] + bf)
Γo =σ(W o。[a< t − 1>,x< t>] + bo)\ Gamma_o = \ sigma(W_o。[a ^ {< t-1>},x ^ {< t>}] + b_o)Γo =σ(W o。[a< t − 1>,x< t>] + bo)
c〜<吨= tanh(W c。[a< t − 1>,x< t>] + b c)\ tilde {c} ^ {< t>} = \ tanh(W_c。[a ^ {< t-1>},x ^ {< t>}] + b_c)c〜<吨= tanh(W c。[a< t − 1>,x< t>] + b c)
c <吨=Γi ∗ c〜<吨+Γf ∗ c< t − 1> {c} ^ {< t>} = \ Gamma_i * \ tilde {c} ^ {< t>} + \ Gamma_f * {c} ^ {< t-1>} c<吨=Γi ∗ c〜<吨+Γf ∗ c< t − 1>
<吨=Γo tanhc<吨a ^ {< t>} = \ Gamma_o * \ tanh {c} ^ {< t>} a<吨=Γo ∗ tanh c<吨
[a< t − 1> ,x <吨] [a ^ {< t-1>},x ^ {< t>}] [a< t − 1> ,x <吨]表示两个矩阵的级联以形成(n a + n x)(n_a + n_x)(n a + n x)x m m m矩阵。一种 。 B A.B A。 B表示A A A和B B B的矩阵乘法,而A * B A * B A * B表示元素乘法。 Γ\ GammaΓ是指门-有关所使用符号的完整分类,请参见上一篇文章定义LSTM。
给定相对于< 2的梯度,以反向传播通过该单元。吨a ^ {< t>} a<吨和c<吨c ^ {< t>} c<吨从下一步的反向传播中,我们需要计算每个权重W i,W f,W o,W c W_i,W_f,W_o,W_c W i,W f,W o,W的梯度c并对bi,bf,bo,bc b_i,b_f,b_o,b_c bi,bf,bo,bc进行偏置,最后我们需要向后传播到上一个时间步长并计算关于a< ; t − 1> a ^ {< t-1>} a< t − 1>和c< t − 1> c ^ {< t-1>} c< t-1>。
这些是很多要计算的偏导数-实际上,随着我们的神经网络变得越来越复杂,将会有更多的偏导数要计算。
首先,由于门方程是相同的,我们可以将它们组合起来,所以我们有一个3 na 3n_a 3 na xmmm矩阵Γ\ GammaΓ包含三个门的输出,我们可以引用矩阵Γi的前三分之一\ Gamma_iΓi和另外三分之二Γf \ Gamma_fΓf和Γo \ Gamma_oΓo。那么我们有一个3 na 3n_a 3 na x(na + nx)(n_a + n_x)(na + nx)权重矩阵W g W_g W g和一个3 na 3n_a 3 na x 1 1 1偏置向量bg b_g bg。
接下来,我们要记录计算中的所有中间阶段(图中的每个节点)。
我们将< t − 1> a ^ {< t-1>} a< t − 1>并且x <吨x ^ {< t>} x<吨形成(n a + n x)(n_a + n_x)(n a + n x)x m m m级联的输入矩阵[a< t − 1> ,x <吨] [a ^ {< t-1>},x ^ {< t>}] [a< t − 1> ,x <吨]。
我们使用权重W g W_g W g和偏差b g b_g b g来计算门Z g Z_g Z g的加权输入矩阵。
同样,我们计算候选存储器c〜<的加权输入Z c Z_c Z c。吨\ tilde {c} ^ {< t>} c〜<吨使用权重矩阵W c W_c W c和偏差b c b_c b c。
(注意:该图使用一个权重矩阵W,但由于使用的激活函数不同,因此有助于分别考虑这些权重)
我们将S型激活函数应用于Z g Z_g Z g以获得门矩阵Γ\ GammaΓ(在图中用f,i,o表示),tanh激活函数应用于Z c Z_c Z c以获得c〜 <吨\ tilde {c} ^ {< t>} c〜<吨(在图中用g表示)。
由于逐元素的乘法和加法是简单的运算,为简便起见,我们将不给出中间输出Γi * c〜<吨\ Gamma_i * \ tilde {c} ^ {< t>}Γi ∗ c〜<吨并且Γf ∗ c< t − 1> \ Gamma_f * {c} ^ {< t-1>}Γf ∗ c< t − 1>自己的符号。
现在,我们将计算图分解为步骤,并添加了中间变量,我们得到了以下等式:
Z g = W g。 [a< t − 1> ,x <吨] + b g Z_g = W_g。[a ^ {< t-1>},x ^ {< t>}] + b_g Z g = W g。 [a< t − 1> ,x <吨] + b g
Z c = W c。 [a< t − 1> ,x <吨] + b c Z_c = W_c。[a ^ {< t-1>},x ^ {< t>}] + b_c Z c = W c。 [a< t − 1> ,x <吨] + b c
c <吨=Γi ∗ c〜<吨+Γf ∗ c< t − 1> {c} ^ {< t>} = \ Gamma_i * \ tilde {c} ^ {< t>} + \ Gamma_f * {c} ^ {< t-1>} c<吨=Γi ∗ c〜<吨+Γf ∗ c< t − 1>
这些方程式对应于图中的节点-左侧变量是节点的输出边,右侧变量是节点的输入边。
这些方程使我们在计算链式规则时可以清楚地看到变量的即时输出-例如对于[< t − 1> ,x <吨] [a ^ {< t-1>},x ^ {< t>}] [a< t − 1> ,x <吨]立即输出是Z g Z_g Z g和Z c Z_c Z c。
如果我们看方程式/计算图,我们通常可以看一下运算的类型,然后使用相同的标识:
加法:如果C = A + BC = A + BC = A + B,则∂C∂A = 1 \ frac {\ partial {C}} {\ partial {A}} = 1∂A∂C = 1和∂ C∂B = 1 \ frac {\ partial {C}} {\ partial {B}} = 1∂B∂C = 1
元素乘法:如果C = A * BC = A * BC = A ∗ B,则∂C∂A = B \ frac {\ partial {C}} {\ partial {A}} = B∂A∂C = = B ∂C∂B = A \ frac {\ partial {C}} {\ partial {B}} = A∂B∂C = A
tanh:如果C = tanhAC = \ tanh AC = tanh A,则∂C∂A = 1-tanh2 A = 1-C 2 \ frac {\ partial {C}} {\ partial {A}} = 1 -\ tanh ^ 2 A = 1-C ^ 2∂A∂C = 1 = tanh 2 A = 1 − C 2
乙状结肠:如果C =σ(A)C = \ sigma(A)C =σ(A),则∂C∂A =σ(A)−σ2(A)= C ∗(1 − C)\ frac {\部分{C}} {\部分{A}} = \ sigma(A)-\ sigma ^ 2(A)= C *(1-C)∂A∂C = =σ(A)−σ2(A) = C ∗(1 − C)
加权输入:这与前馈神经网络相同。如果Z = W。 X + b Z = W.X + b Z = W。 X + b然后:
∂J∂W = 1 m∂J∂Z。 XT \ frac {\ partial {J}} {\ partial {W}} = \ frac {1} {m} \ frac {\ partial {J}} {\ partial {Z}}。X ^ {T}∂W ∂J = m 1∂Z∂J。 T
∂J∂b = 1 m ∑ i = 1 m∂J f Z \ frac {\ partial {J}} {\ partial {b}} = \ frac {1} {m} \ sum_ {i = 1} ^ { m} \ frac {\ partial {J}} {\ partial {Z}}∂b∂J = m 1 i = 1 m∂Z∂J
∂X = W T。 ∂J∂Z \ frac {\ partial {J}} {\ partial {X}} = W ^ {T}。\ frac {\ partial {J}} {\ partial {Z}}∂X∂J = WT 。 ∂Z∂J
有了这些通用的计算图原理,我们就可以应用链式规则。我们对偏导数进行元素乘(∗ * ∗),即
∂J∂A =∂J∂B ∗∂B∂A \ frac {\ partial {J}} {\ partial {A}} = \ frac {\ partial {J}} {\ partial {B}} * \ frac {\ partial {B}} {\ partial {A}}∂A∂J = =∂B∂J ∗∂A∂B
因此,如果B = f(A)B = f(A)B = f(A)且C = g(A)C = g(A)C = g(A),即BBB和CCC是AAA中的立即输出计算图,然后将偏导数求和:
∂J∂A =∂J∂B ∗ B∂A +∂J∂C ∗∂C∂A \ frac {\ partial {J}} {\ partial {A}} = \ frac {\ partial {J}} {\ partial {B}} * \ frac {\ partial {B}} {\ partial {A}} + \ frac {\ partial {J}} {\ partial {C}} * \ frac {\ partial {C} } {\ partial {A}}∂A∂J = = B B∂J ∗∂A∂B +∂C∂J ∗∂A∂C
在TensorFlow或Keras之类的深度学习框架中,每个可区分的操作都将具有这样的身份。
尝试计算∂J∂A \ frac {\ partial {J}} {\ partial {A}}∂A∂J时,我们将使用以下一般公式:
∂J∂A =∂J∂B ∗∂B∂A \ frac {\ partial {J}} {\ partial {A}} = \ frac {\ partial {J}} {\ partial {B}} * \ frac {\ partial {B}} {\ partial {A}}∂A∂J = =∂B∂J ∗∂A∂B
为简便起见,我们将使用上述操作的标识替换∂B∂A \ frac {\ partial {B}} {\ partial {A}}∂A∂B的值。
∂J〜a〜<吨=∂J<吨∗Γo \ frac {\ partial {J}} {\ partial {\ tilde {a} ^ {< t>}}} = \ frac {\ partial {J}} {\ partial {a ^ {< t>}}} * \ Gamma_o∂a〜<吨∂J = a<吨∂J ∗Γo
∂JΓo =∂J∂a<吨* a〜<吨\ frac {\ partial {J}} {\ partial {\ Gamma_o}} = \ frac {\ partial {J}} {\ partial {a ^ {< t>}}} * \波浪号{a} ^ {< t>}∂Γo∂J = = a a<吨∂J ∗ a〜<吨
使用方程式6,并将方程式5写为c <c的方程式。 t + 1> c ^ {< t + 1>} c< t + 1>而不是c<吨c ^ {< t>} c<吨(即在时间步长上加1):
∂c<吨=∂c< t + 1> *Γf +∂J∂a〜<吨∗(1 − a〜< t> 2)\ frac {\ partial {J}} {\ partial {c ^ {< t>}}} = \ frac {\ partial {J}} {\ partial {c ^ {< t + 1>}}} * \ Gamma_f + \ frac {\ partial {J}} {\ partial {\ tilde {a} ^ {< t(>}}} *(1- \ tilde {a} ^ {< t> 2})∂c<吨∂J = c< t + 1> ∂J ∗Γf + + a a<吨∂J ∗(1 − a〜< t> 2)
∂J c〜<吨=∂c<吨∗ i i \ frac {\ partial {J}} {\ partial {\ tilde {c} ^ {< t>}}} = \ frac {\ partial {J}} {\ partial {c ^ {< t>}}} * \ Gamma_i∂c〜<吨∂J = c<吨∂J ∗Γi
∂J∂i =∂C∂<吨* c〜<吨\ frac {\ partial {J}} {\ partial {\ Gamma_i}} = \ frac {\ partial {J}} {\ partial {c ^ {< t>}}} * \ tilde {c} ^ {< t>}∂i =∂c<吨∂J ∗ c〜<吨
∂JΓf =∂J∂c<吨* c< t − 1> \ frac {\ partial {J}} {\ partial {\ Gamma_f}} = \ frac {\ partial {J}} {\ partial {c ^ {< t>}}} * c ^ {< t-1>}∂Γf J = c<吨∂J ∗ c< t − 1>
∂J∂Z g =∂J∂ΓΓ∗(1 −Γ)\ frac {\ partial {J}} {\ partial {Z_g}} = \ frac {\ partial {J}} {\ partial {\ Gamma }} * \ Gamma *(1- \ Gamma)∂Z g∂J = =ΓΓJ ∗Γ∗(1 −Γ)
∂Z c = c c〜<吨∗(1 − c〜< t> 2)\ frac {\ partial {J}} {\ partial {Z_c}} = \ frac {\ partial {J}} {\ partial {\ tilde {c} ^^ { < t>}}} *(1- \ tilde {c} ^ {< t> ^ 2})∂Z c∂J =∂c〜<吨∂J ∗(1 − c〜< t> 2)
公式1和2相同,偏导数也相同,只是下标不同。
∂J∂W g = 1 m∂J∂Z g。 [a< t − 1> ,x <吨] T \ frac {\ partial {J}} {\ partial {W_g}} = \ frac {1} {m} \ frac {\ partial {J}} {\ partial {Z_g}}。[a ^ {< t-1>},x ^ {< t>}] ^ T∂W g∂J = m 1∂Z g∂J。 [a< t − 1> ,x <吨] T
∂J bg = 1 m ∑ i = 1 m∂Z g(i)\ frac {\ partial {J}} {\ partial {b_g}} = \ frac {1} {m} \ sum_ {i = 1} ^ {m} \ frac {\ partial {J}} {\ partial {Z_g ^ {{i}}}}}∂bg∂J = m 1 i = 1 m∂Z g(i) ∂J
∂J∂Wc =1m∂J∂Zc。 [a< t − 1> ,x <吨] T \ frac {\ partial {J}} {\ partial {W_c}} = \ frac {1} {m} \ frac {\ partial {J}} {\ partial {Z_c}}。[a ^ {< t-1>},x ^ {< t>}] ^ T∂W c∂J = m 1∂Z c∂J。 [a< t − 1> ,x <吨] T
∂J bc = 1 m ∑ i = 1 m∂Z c(i)\ frac {\ partial {J}} {\ partial {b_c}} = \ frac {1} {m} \ sum_ {i = 1} ^ {m} \ frac {\ partial {J}} {\ partial {Z_c ^ {(i)}}}}∂bc∂J = m 1 i = 1 m∂Z c(i) ∂J
∂J∂[a< t − 1> ,x <吨] = W g T。 ∂J∂Z g + W c T。 ∂J∂Z c \ frac {\ partial {J}} {\ partial {[a ^ {< t-1>},x ^ {< t>}]}} = W_g ^ T。\ frac {\ partial {J}} {\ partial {Z_g}} + W_c ^ T。\ frac {\ partial {J}} {\ partial {Z_c}}∂[ < t − 1> ,x <吨]∂J = W g T。 ∂Z g∂J + W c T。 ∂Z c∂J
因此,通过将计算图分解为多个步骤,我们可以将计算分解为更小的更简单的步骤,而仅使用上述操作的派生身份。 我们看到的激励性示例使用LSTM网络对IMDB评论数据集进行情感分析 #我们计算dC< t> 因为我们都需要dC< t + 1> 和dA < t> #关于IFO门的输出的导数-滥用表示法称为dIFO #关于门的未激活输出的导数(在应用S型信号之前) 今年夏天,我正在用自己的博客讲授我今年学到的主题。 这是双赢的局面-您可以获得计算机科学教程,并且可以与您分享! 在检查反向支撑方程式时,有一个数字检查器会很有帮助-我在随附的Jupyter笔记本中写了一个数字检查器。
我们开始研究该系列中最常用的术语,然后研究林中的简单机器学习算法。 ......