千粒脑的情报理论(2019年)
在我们最近的同行评审纸上,基于Neocortex的网格单元的智能和皮质功能框架,我们提出了一种新颖的Neocortex工作原理。千粒大脑的智力理论提出,而不是学习一个物体(或概念)的一个模型,大脑构建了每个对象的许多模型。每个模型都是使用不同的输入构建,无论是从传感器略微不同的部分(如手上的不同手指)或完全来自不同的传感器(眼睛与皮肤)。模型投票达成了对他们所感受的达成共识,并达成共识是我们所感知的。好像你的大脑实际上是成千上万的大脑同时工作。
我们理论的一个关键洞察力基于对网格细胞的理解,神经元在负责导航的大脑的较旧的部分中发现,并知道您在世界的位置。在过去的几十年里,科学家在理解网格细胞的功能是代表环境中的身体的位置。最近的实验证据表明网格细胞也存在于Neocortex中。我们建议在每个区域和每个皮质列中存在整个Neocortex的网格细胞,并且它们定义了基于位置的框架,了解Neocortex如何工作。 Neocortex使用了在大脑较旧的基于大脑的基于网格单元的机制,以了解环境的结构,以了解物体的结构,而不仅仅是它们的结构,还可以是他们的表现方式。
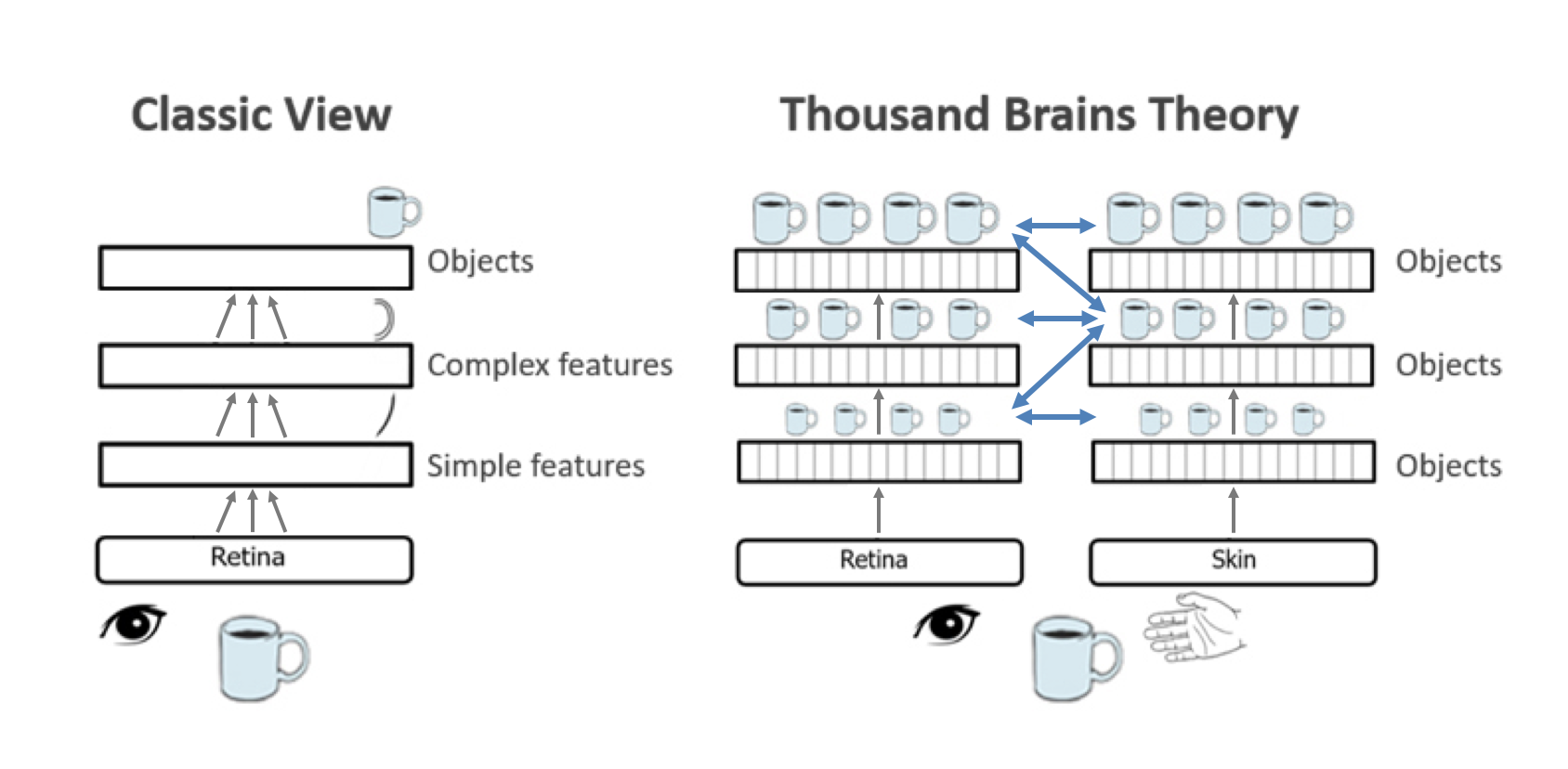
千粒大脑的智力理论与当前的神经网络非常不同。大多数神经网络基于长期视图,即Neocortex从感官器官接收输入并将其处理在一系列分层步骤中。感官输入从区域到区域,在每个级别,细胞响应更大的区域和感觉阵列的更复杂的特征。通常假设完整的对象只能在层次结构中以足够高的级别识别,其中小区可以采用整个感官阵列。
在千粒大脑的智能理论中,每个专栏都会根据其相关传感器移动,根据它可以感知的内容创造了世界的完整模型。列将感觉输入与网格单元衍生的位置相结合,然后将这些“在位置处的感觉特征”集成在运动中。 Cortex中的远程连接允许列一起工作以快速识别对象。
为了在我们最新的纸张中说明这一概念,我们使用咖啡杯的示例。想象一根手指触摸咖啡杯。当你将手指移动到杯子上时,你感觉到它的不同部分。你可能会感觉到唇部,然后曲柄的曲线,然后是底部的平坦度。您接收的每个感觉是相对于其位置处理的。杯子的弯曲手柄始终处于杯子上的相同位置;它不是相对于你的特征。在一瞬间,它可能在你的左边,另一个时刻在右边,但它总是在杯子上的相同位置。如果您被要求通过用一根手指触摸它来达到一个框并通过触摸它来识别此对象,您可能无法使用单一触摸。但是,如果您继续将手指移动到对象,则会将来自不同位置的更多感官功能,直到您确定唯一的对象,其中包含这些位置的唯一包含这组功能的对象是咖啡杯。
现在想象一下同样的杯子,但这一次你同时用多个手指抓住它。虽然在你必须将手指移动到识别杯子之前,现在您可能能够用单一的掌握来识别它。与每个手指关联的列没有足够的信息,以识别杯子,但列之间的连接允许它们更快地达到正确的答案。实际上,列“投票”至于最可能的物体是什么,并在杯子上快速定居。横跨感官发生相同的过程,因此处理视觉输入的皮质列可以与列处理触摸通信。事实上,在皮质的经典层次模型中没有意义的低级感官区域之间存在连接,但在千粒大学理论中有意义。
因此,单个列可以通过运动识别对象(一个手指触摸杯子多次)或通过共享信息的列之间的远程连接,以达成一词对象是(抓住和看一个mug)。这是一个动画片例证,显示经典层次结构和我们提出的替代模型。请注意,我们并不暗示皮质不是组织成地区的层次结构;它是,层次结构很重要。但是在层次结构的每个级别存在完整的对象模型。
如果通过这种方式组织大脑,那么它提出了问题:我们还需要以这种方式建立智能机器吗?今天的人工神经网络在经典的层次视图上工作,通常具有一百或更多级别。这些网络非常擅长分类图像和其他模式。因此,AI可能似乎千粒大脑的智力理论是不需要的。然而,众所周知,今天的AI并不靠近人类智能的灵活性,并且在将一个域中的学习应用于不同类型的问题时,它并不近在咫尺。概括。
有两个理由表明,需要千粒的智力理论来解决这些和其他挑战。首先,我们的提案说Cortex中的列学习对象的三维形状,而不仅仅是在我们的传感器上出现的二维形状。这种更强大的对象模型为学习对象的行为提供了基础,或者对象的形状和外观如何随着时间的交互而变化。对象的三维表示还提供了学习组成结构的基础,即对象如何由特定方式排列的其他物体组成。在我们的论文中,我们提供了有关Cortex如何代表对象构思,对象行为甚至高级概念的机制的详细信息。其次,千粒大脑的智能理论提供了跨感觉方式集成的手段,有时称为“传感器融合”。它提供了一种模型,用于如何在一种模态中学习,例如触摸,可以应用于和集成其他方式,例如视觉。
千粒大脑的智力理论是一种丰富的概念,使我们能够解释大脑的许多谜团。我们很乐观,这项工作提供了新的洞察力,可以应用于构建更智能和有用的AI产品。
如果您有兴趣了解更多关于智力理论背后的详细信息,这里有一些额外资源: