Energid develops robotic vehicle simulation software for NASA
by yiyix on 2010-08-28 22:03:02
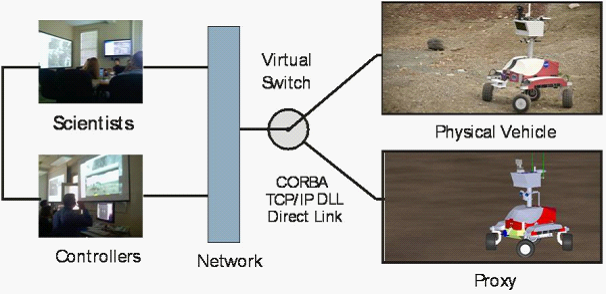
Energid develops robotic vehicle simulation software for NASA to realistically simulate NASA robotic hardware. The research and development work consisted of 1) converting the CAD model of the NASA robot into a simulation format, 2) building a simulation system for the actual physical characteristics of the robot itself and its interactions with various surfaces, 3) automatically generating terrain based on the data obtained from the vision system, 4) configuring dynamic parameters in real time, and 5) interacting with NASA software.



