超音速电动飞行
这篇文章的灵感来自最近关于劳斯莱斯Accel的新闻稿,劳斯莱斯Accel是一种实验性的电动飞机,旨在尝试记录电动速度。亲密的朋友知道,自2012年以来我一直在这个领域里闲逛,但我认为是时候写一个更全面的博客了,部分原因是要认识到技术受众的增长,部分是因为我没有任何经验恢复该领域工作的短期计划。
通常免责声明适用:我是物理学家,飞行员和无人驾驶飞机飞行员,有各种各样奇怪的想法。我将在另一个没有正式资格的话题上写一个5000字的示范,说明我的令人毛骨悚然的无知。更糟糕的是,我认识十几个人,对此我了解的甚多,其中一些人甚至阅读了此博客。但是他们还没有写这个博客,而且我从来没有让这种怀疑过去阻止过我,所以为什么现在停止?显然,我们会竭尽全力提供技术细节,我很幸运能收到一些业界精英的反馈!
让我们从快速查看相关速度记录开始。正式有142架飞机以超音速飞行,其中只有两架(协和飞机和Tu-144)是民用飞机。所有这些都是由喷气发动机驱动的,通常带有加力燃烧室。
截至2018年中,多旋翼飞机的电气记录为245 mph,电动模型飞机的电气记录为308 mph,而进行动态飙升的滑翔机的电气记录为545 mph。相比之下,声速约为767英里/小时,因此所有这些飞机的一部分已经处于超音速状态。 2017年,电动Extra EA-330LE创造了207 mph的纪录,劳斯莱斯团队希望将其扩展到300 mph,甚至更多。
电动飞机是一种新兴技术。小时候,无线电遥控飞机几乎都是2冲程发动机驱动的轻木系统,带有相当定制的电子设备。如今,电气已成为RC领域的规范,尤其是多转子(四轮驱动/无人机),如果没有电子速度控制器,这是不切实际的。
电动飞机有一定的优点和缺点。优点包括机械简单性和可靠性,降低的噪音,降低的成本,提高的效率以及减轻的发动机重量。主要缺点是电池能量密度充其量仍然最多仅比汽油低50倍。即使考虑到其他效率提升,电动飞机也大大缩短了飞行时间和航程。
我认为电动飞机可以打破声音障碍的根本原因是,电动机可以提供比活塞发动机,喷气式飞机或涡轮机更高的功率重量比。 F-4 Phantom是高推力的教科书示例,能够(仅)实现垂直爬升。相比之下,只要花100美元,我就可以买到可以10 gs垂直加速的赛车无人机。还有其他因素在起作用,但权重比可能高达10。
在基本的身体限制方面,让我们考虑一下协和飞机。尽管大多数战斗机最多可以超音速飞行几分钟,但协和飞机无法在空中加油,因此只能在单跳中穿越大西洋。它可能以2马赫的速度航行201分钟!假设将电池能量密度和电动机效率考虑在内,采用当前技术的电气系统的量程将缩小10倍。尽管如此,一架协和飞机仍能飞行20分钟,覆盖近450英里。比特斯拉的射程更大!将其按比例缩小10倍,并且平方立方定律将飞行时间减少到2分钟,这是足够的时间来加速和覆盖两个方向的测试过程。
当然,可以开发出比Concorde克隆更好的配置,但这是一个有趣的起点。特别是,许多超音速飞机都使用三角翼,因为在一定速度范围内升力特性相对一致。这并不是说协和飞机需要巨大的机翼才能以2万英尺的速度飞行2马赫。协和飞机需要巨大的,笨拙的机翼缓慢地飞行,以降落在跑道上。但是,电动飞机可以像直升机一样提供必要的动力和控制,以实现垂直起降(VTOL)的需求,而根本不需要太多机翼。
在深入探讨不同子系统的细节之前,我将通过呼吁显而易见的事物来激发示例点设计。超音速电动飞机必须具有很大的推力和最小的阻力。当我们考虑它的外观时,就会想到F-104 Starfighter。长而尖,并具有最低的机翼。
电动版本将消除发动机进气口(无需亚音速流!),以交叉配置将机翼加倍,撕下尾翼,并用电池更换几乎所有内部零件。
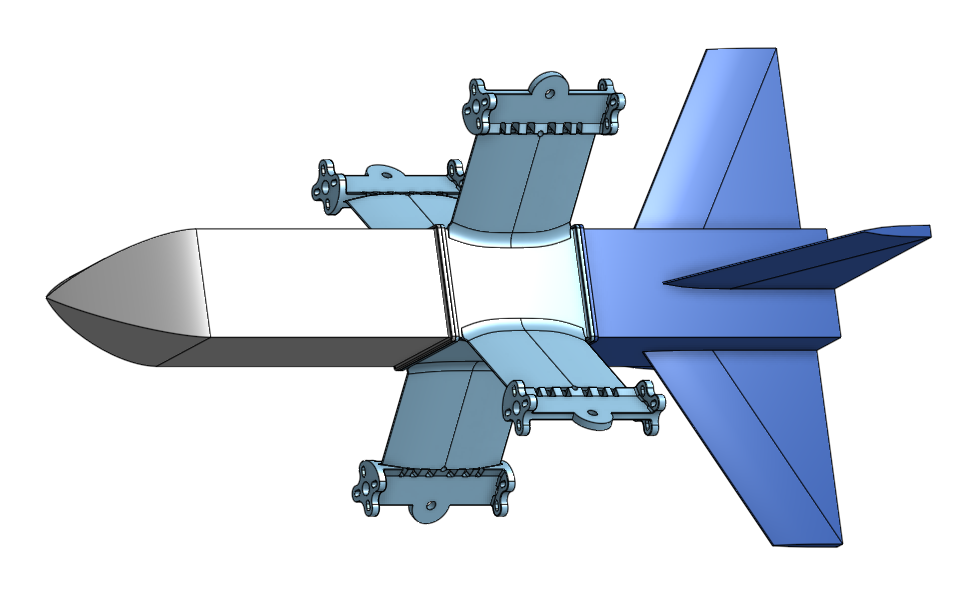
这是我在建立家庭之前未能完成的赛车无人机比例原型的CAD模型。预计可为两节5s 200C电池串联,为8个80 A ESC供电,向8个2600 kV电机供电,峰值功耗为26 kW(!)。在横截面积为0.007 m ^ 2且阻力系数约为0.1的情况下,典型的80%的亚音速螺旋桨机械效率会使其通过声屏障。但是,这不是螺旋桨效率的合理假设。无论实际性能如何(我希望时速为300英里/小时),它都会在厨房工作台的台式测试中提供主要的折皱因素。即使在耳罩中也充耳不闻。
螺旋桨似乎是一个不错的起点,其次是动力,散热,航空,结构,控制装置和电池。
通常,快速飞机使用喷气发动机进行推进。它们的压缩机级以亚音速运行,因此所有超音速喷射器都具有复杂的进气系统,旨在在冲击涡轮之前通过一系列的冲击来使涌入的空气减速。通常,建造涡轮机以吸收超音速流似乎是灾难的秘诀。喷气机需要亚音速流,因为燃烧通常是亚音速发生的。电动螺旋桨没有这种限制,也不在乎80%的大气层不是氧气。
值得解决的第二个直观误解是螺旋桨是否可以超音速。事实证明,高旁通涡扇发动机的叶尖不仅在起飞过程中超过了声障,而且一些高性能单引擎飞机(如Beechcraft Bonanza)还通过螺旋桨叶尖周围的超音速气流产生了独特的起飞嗡嗡声,从而消除了震动。
在更极端的水平上,Tu-95实际上使用超音速螺旋桨进行操作,这是其超高巡航速度的原因。 4台16,000 hp的涡轮机中的每台都驱动两个反向旋转的4叶片螺旋桨。有趣的是,可以从地平线上听到它。
考虑到螺旋桨只不过是旋转的翼型,其螺距和翼片已针对视风速进行了调整,因此电动驱动的螺旋桨可以超过声屏障应该不会太神秘。虽然Tu-95本身是亚音速的,因此流过螺旋桨毂的气流是亚音速的,但没有任何事实理由说明扭曲的超音速螺旋桨翼片不能完全在超音速状态下工作。在许多方面,这样做大大简化了空气动力学设计!
良好的亚音速机翼可以产生30或40的升阻比(L / D),但螺旋桨将扭矩转换为推力的机械效率受到视在风向的限制。即使螺旋桨的旋转速度比飞机巡航速度快10倍,L / D向量的10:1旋转也将效率限制在约85%。
超音速螺旋桨将很幸运地获得其中的一半。首先,Küchemann关系指定超音速L / D大致为4(M + 3)/ M,其中M是马赫数。更糟糕的是,由于离心力而导致的机械限制阻碍了高角速度。对于3马赫的螺旋桨尖端速度,Küchemann关系式的L / D为8。但是,如果巡航速度仅为1.2马赫,则有效螺旋桨效率为63%,这是叶片效率最高的部分。我认为可以安全地假设道具效率约为30%,考虑到大量的工程血液,汗水和眼泪,道具效率可能会提高到45%。由于箔片在亚音速飞行阶段会停转,因此在较低速度下效率不会提高。
让我们考虑一个直径3 m的螺旋桨,该螺旋桨与F-104规模的飞机一致。尖端的加速度为660,000 m / s ^ 2,或66,000 gs。如果由具有线性锥度的碳纤维制成,则峰值拉伸应力约为400 MPa,远低于该材料的3.5 GPa极限拉伸强度。二次/圆锥锥度的峰值拉伸应力为25 MPa,完全在钢的能力范围内。扭转和振动的公差也是材料选择的考虑因素。拉伸应力的要求不会随比例尺而变化,因此,在子比例尺下对超音速道具进行机械测试不会有任何损失或优势。
风扇还是道具?螺旋桨盘的填充比例取决于推力密度要求,这最终会驱动电动机的选型。 F-104达到声屏障需要44 kN。每个叶片产生大约0.5 * rho * Cd * A * v ^ 2 *(L / D)= 0.5 * 1.3 * 0.1 * 1 * 0.01 * 1000 ^ 2 * 1.6 = 1 kN推力。在4个机翼的每个机翼上有2个电动机,每个电动机需要6个叶片才能超过此推力水平。
让我们看看超音速巡航期间的系统功率需求。在1.2马赫时,推力为44 kN时需要18兆瓦的机械功率。假设螺旋桨效率为30%,则需要60兆瓦的电功率,理论上是在8台功率分别为8兆瓦的电动机之间分配。那是一个很大的马达。
VTOL的电源要求有些不同。最大起飞重量为13166千克,垂直悬停需要129 kN的推力。根据基本的旋翼理论,在30%(亚音速,失速)支撑效率的情况下,我们获得了5.4 MW或18 MW所需的机械功率。这是巡航速度的三分之一,这表明在发射时可以实现快速加速。
最好的永磁飞机电动机的功率重量比约为12 kW / kg,每个电动机的重量约为650千克,尽管我相信,随着特斯拉永磁同步磁阻电动机的发展,可以达到400千克。
这东西融化有多严重?如果电动机的效率为99%,则在巡航功率下,每个电动机将产生80 kW的热量。这大致相当于50马力活塞发动机的热量输出,因此,我相信可以仅通过空气冷却来进行管理。开关装置,电池连接件和螺旋桨尖端也会变热,但不会超出已知材料科学的范围。
像所有超音速飞机一样,F-104的空气动力学设计也遵守区域规则。即,该平面的横截面面积必须从鼻子到尾部平滑地变化,以防止形成中间冲击。螺旋桨本身也必须遵循面积规则,使用双三角形状也有助于机械锥度。
在巡航中,飞机产生44 kN的阻力和129 kN的重量。在KüchemannL / D为14的情况下,只需9 kN的升力引起的阻力即可保持水平飞行,其余35 kN则是寄生的。换句话说,这一点设计遵循了F-4的“推力胜过空气动力学”的脚步。如有疑问,请减少机翼面积。控制权不需要机翼,仅机身本身就可以轻松产生足够的升力。
螺旋桨产生很大的扭矩,理想情况下,通过翼尖推力舱的每个末端处的反向旋转支撑,或者甚至在同一电动机上,该扭矩会局部反作用。剩余的大部分预算都由电池消耗,因此应尽可能保持结构的效率。
与传统飞机不同,给定配置的超音速电动飞机将需要主动控制以进行转向,并在低速时保持稳定性。我认为进行航空设计将阻力中心置于质心之后是有意义的,即使设计是对称的。高速稳定性降低了控制频带所需的功率裕度。这就是为什么我的原型机带有鳍片的原因,鳍片还可以用作尾座起落架。
对于规模不大的未演示者,保持视线可能会很困难。现成的商用GPS和惯性制导系统的设计无法在极高的速度下运行(猜测原因……),因此在此需要一定的技术关注。在最简单的情况下,非制导被动稳定模型可以执行垂直爬升和降落伞恢复。
把好东西留到最后。这东西的电池看起来像什么?起飞重量为13166千克(与我们的定点设计的F-104相同),电池质量分数为60%,因此7900千克高性能锂离子电池(265 Wh / kg)可以提供2.1 MWh的电量。耗电量为60 MW时,电池将持续126秒,需要至少30C的放电容量。
测试飞行轮廓可能如下所示:–悬停,以2gs的速度加速20秒钟,以400 m / s的速度水平飞行。 –巡航90秒,覆盖36公里(22英里)。 –以1.5 gs的速度再生减速30 s。 –过渡到垂直悬停并着陆,需要10 s。总飞行时间:150秒(2.5分钟)。总距离:47公里。
以上所有分析均假设在水平飞行中有测试物品。将螺旋桨效率从30%提高到45%,放大10倍,并拥有500 Wh / kg的电池,在1.5马赫的速度下飞行时间为40分钟,总航程约为1200公里。尽管如今电池在飞行应用中仍然不受欢迎,但它们每年稳定增长约5%,并且很可能会持续增长。因此,现在是时候开发其余的飞行硬件了。等到可商业化的超音速(或亚音速)电动飞机机身准备就绪时,电池就会被赶上。
但是没有理由将自己限制在水平飞行中。电动推进不依赖燃烧,因此原则上只要飞行表面上的动压力和质量通量保持大致恒定,就可以随高度增加速度。在实践中,高阻力向下降低,密度高则呈指数递减,意味着最佳点在50k到80k英尺之间。要在100k英尺的垂直爬升速度下达到5马赫,就需要4 gs的恒定加速度,因此,乘客舒适度可能需要倾斜的飞行曲线。在40秒(垂直)或80秒(倾斜2 g)后,飞机处于抛物线弹道,将其带到太空边缘并在4分钟内返回,从而在短短6分钟内实现了500 km的跳跃,包括减速降落。这可能是从洛杉矶到旧金山的最荒谬的方式。



