开源战争 - DIY无人机战的鲜明现实
一直在考虑长时间写这篇文章,思考好处与我要写的潜在成本。这里将在公共领域中提供的所有内容,现在大部分都是如此。在这一点上被竞争,因为有些糟糕的演员可以使用它作为某种灵感,但是由于目前在决策位置缺乏理解,这是一个很重要的是暴露可用的能力真正的能力是重要的感谢现代消费者技术和简单的在线购物。已经从文章中删除了一些链接,教程,视频和在线购物资源,或者没有包含在TI中的一部希望使生活更加困难,希望利用这一点作为指导,但现实是我们将讨论的大多数人的细节只是几个谷歌搜索。
在过去的二十年中,消费者技术已经令人印象深刻的跳跃。一般连接,传感器和微计算机只是一些流行的例子,所有这些进步对于我们将与本文分析的分析至关重要。至关重要的是互联网通常以及分享在其上的令人印象深刻的信息,指导,软件和一般资源。
小型反叛组织,恐怖主义组织,军事承包商,小型军事力甚至合法的抵抗力力量(见乌克兰),一直资本化此类技术和信息改进,而在过去十年中,特别是我们看到了一个迅速发展的“开源战争“景观,特别是对于通常称为”无人机“的东西。
(那些领域的那些在我身上吠叫我的使用简单,通用但流行的术语“无人机”,所有类型的首字母缩略词都是实际使用的,但为了简单起见,并且为了想象一下的个人乐趣我使用这个词,我计划在这篇文章中滥用它🙂)
第一步将是解释我将写作的车辆的核心特性背后的基础知识。
多种设计和车辆类型可用于邪恶的目的,我们将讨论,虽然我们将专注于本文中的飞行平台,但请知道几乎所有我们将讨论的一切都适用于轮式,追踪,浮动甚至潜水车辆。
在最基本的旋转设计中,直升机依赖于螺旋桨来反力。更现代(和有点残酷的)方法,感谢电动发动机和现代电子产品,是多型器材,非常易于设计,依靠非常简单的组件。由于它们的扩散和更简单,我们将忽略这篇文章中的直升机,并专注于多个转弯。
在他们最受欢迎的化身中,多个转弯器将有4个发动机和4个螺旋桨(四转螺旋桨)成对旋转的相反方向(这是为了抵消由发动机产生的扭矩)。为所有发动机提供更多的电力来爬上或降低它以下降是基本原理,调节每个发动机的功率(成对通常)将允许更复杂的操作作为俯仰和滚动。
这种设计可以很小,可以从极其有限的空间发射,甚至非常容易飞行,即使是缺乏经验的飞行员。由于它们的性质和用于反对重力的能量,这种设计将altho的范围和有效载荷有限。
飞机依靠升力飞行(旋转设计,但解释出来的本文的范围),翼根据前进速度,提供抵抗重力的向上力,使发动机产生的功率是单独集中在前进的平台上,移动的速度越快,翅膀产生的升力就越多,在靠近目的地时遇到了更多的重力。这是什么转化为非常好的范围和有效载荷功能,特别是与旋转设计相比。当他们要求类似于小型空中的东西(根据设计的大小和重量而变化)或其他一些发射系统来获得空气中的无人机(较小的设计可以手动推出,而且可以手动推出,而是手工推出的其他发射系统范围增加,排序的弹射器成为Sibstrip以外的选项)。
我们应该了解到,基于设计类型,我们可以预计我们DIY战争仪器的繁重不同的范围。通过旋转设计,可以容易地实现高达约20公里的范围,超越该设计变得更加复杂,逐渐引起能量存储方法(电池)和设计速度的限制。混合方法对这个问题非常有效,用这种设计,例如采用燃烧发动机能够产生电力的电力,以便为电动的电力保留无人机飞行,由于这种方法,车辆可以达到超过2.5小时(或超过200kms范围)运用超过20公斤的有效载荷。
对于固定的翅膀设计,它可以想到实现相当令人印象深刻的范围,而不是相当容易地达到多个KM。
通过有效载荷,我们打算将设计能够携带的重量,除了它需要飞行,此类弹头,监控/ Recon设备以及最终的高级指导相关组件(即将推出)。正如范围一样,旋转设计通常比固定的方式更受限制,有效载荷容量(如今,电池技术的未来突破将直接影响此问题,在大多数情况下仍然很远低于10公斤。
固定翼设计从有效载荷限制遭受较小的方式,其有效载荷直接连接到所选择的电源/能源(发动机/燃料),设计尺寸和所需范围。但更稍后在这一点。
在大多数情况下,旋转设计将限于用于推进和电池作为能量存储方法的电动发动机。可以想到,假设类似于具有燃烧发动机和燃料的直升机作为能量存储方法的旋转设计,但是这种设计将更复杂和出于本文的范围。实际上,易于购买或设计旋转基于旋转的无人机将是完全电动(严重影响其范围和有效载荷的东西),但这并不意味着更具忠诚的设计师无法提出替代解决方案。
对于固定翼设计,攻击者将不得限于限制,简单的选择是更多的电动发动机和电池,但燃烧发动机也是一种简单,便宜和流行的选择。根据预算甚至喷气发动机也可以想到。
在他们最基本的化身中,这种无人机只能远程控制。一个“飞行员”将舒适地坐在远离目标的地方,并将无人机引导到最终目的地。便宜的和商业上可获得的通信套件将使我们的无人机可以在需要的情况下从数百公里的距离中驾驶,以便极具足够的实时视频饲料,允许极其精确的指导。
这种指导类型应该是最容易破坏的,因为“卡住”飞行员和车辆之间的无线电链路应该让无人机不受控制,直到它撞击到远离其预期目标的某处。原则上,正如在大约二十年前的那样,干扰这样的信号应该非常容易,用于引导无人机的无线电链路在特定的射频和干扰器上运行,只需要在这种频率上传输“噪声”(具有比要中断的信号更高的功率,以打破指导链路。好吧,它不再那么容易......
在过去的几十年中,我们已经看到了几十个消费者技术的引入和扩散,这些技术通过无线电信号运行,使得EM(电磁)频谱稍微堵塞。它基本上好像源自家庭WiFi设置,手机,数字电视等的并发信号,在那里“卡住”彼此不情愿地。
为了衡量这一点,消费者技术已经开始采用以前限于高端军事系统(该跳频的敌人干扰)的技术,该技术称为“跳频”,该技术包括在无线电发射器中,并且在随机图案中不断地切换频率,以便最小化不同信号在相同频率上冲突的机会(每个都用于微小的时间)。如果发生冲突并不是一个很大的问题,因为下一个数据包可能会在不同的频率和通信链路上进行槽不会受到很大的影响(对于熟悉网络的人来说,这类似于网络协议的包丢失设计成使其效果不干扰)。
干扰跳频通信链路要求干扰平台传输比它所想要的频率更强大的信号,并且必须通过目标通信可以采用的全频谱来实现。为此,卡住平台中可用的功率必须在严重影响其范围的多个频率上划分。
现代,消费者,遥控器和接收器采用不同质量和复杂性的频率跳跃,而高端RC通信齿轮常用于昂贵,在过去十年中,我们已经看到许多便宜的解决方案可用,具有体面,长距离(&gt ; 100公里),解决方案耗资少于100美元在线。
所有这些都说,现代EW(电子战)解决方案可以在一定程度上仍然对比这种引导方法,通过检测传输源(飞行员将在哪里有稍微有限的范围)和更有效地进行对比这种引导方法。是)和“照顾它”。这是因为一旦开始传输无线电信号,就会非常容易检测这样的信号并针对其源极。
因此,虽然现代技术在战争方案中再次相关的“遥控”的纯粹“遥控”进行了相对简单的指导方法,但它的实际可用性是有些限制,因为可能检测到信号的来源(具有符号致命的后果),飞行平台将被检测到它将需要恒定无线电传输流的数据和视频馈送,并且信号仍然可以在许多情况下被堵塞(这个altho取决于许多因素,EW平台受到限制并且无法保护每个潜在的目标。此外,在一些城市情景中,即使针对信号源也可能不允许足够快的响应)
GPS等技术的扩散自多年以来已达到消费者RC平面和“无人机”市场。关闭货架产品可以编程为从一个位置起飞,遵循特定和精确的飞行路径,并以子表精度达到指定目标。许多商业Quadcopters将提供具有花哨和精心设计的应用程序的能力,允许在智能手机或平板电脑上进行少量点击措施编程非常复杂的飞行计划。
为实现这一目标,商业产品依赖于GPS(或类似)接收器,陀螺仪,加速度计和数字指南针,所有组件都感谢现代智能手机。所有这些传感器都撰写了所谓的IMU(惯性测量单元),该IMU(惯性测量单元)将数据与不同传感器的数据混合并返回精确的位置,速度,高度和姿态。通过这种数据,什么是现在琐碎的软件,可以指导任何车辆,成为汽车,飞机,Quadcopter或未来派婴儿车。
这允许我们的攻击者对搁板产品进行很少的修改(仅需要以某种方式触发弹头)并获得可以通过或多或少复杂的路线飞行,驱动或一般地到达目标的自主车辆并带来向这些目标造成严重破坏。
通过这种指导方法,启动攻击的人类可以几乎没有曝光,既不发出攻击,也没有飞行平台将发出可以检测到的无线电信号,甚至没有必要具有飞行技能的“飞行员”的“飞行员” /将攻击平台驱动到目标。
这些攻击的那些卫冕的卫冕具有一个相当简单的方法来抵消它,这是定位信号(GPS,GLONASS等)的干扰或欺骗。由于设计了GPS等系统,它们可以很容易地卡住,它们不采用跳频,信号从空间传输,电源很低,因此很容易压倒,并且使无人机大部分宽松它的位置意识。在这种情况下,大多数消费者平台将简单地降落于恐慌或尝试在其路径上返回返回,直到重新获得信号。消费者级定位系统也受到所谓的“欺骗”,基本上包括欺骗平台,以接收到允许拒绝在广泛区域(俄罗斯/乌克兰等链接文章中的示例中的正确定位数据的假信号)。欺骗也可以以更复杂的方式使用,基本上允许通过对其感知位置的微小调整来指导目标平台。
最近,商业世界已经前往非GPS依赖解决方案,因为在许多情况下,即使对于民用使用,卫星信号也不可靠,以便对使用平台的人日益精确的需求。惯性和光学的定位正在缓慢地进入消费世界,并且已经可用于那些想要在DIY设计中进行实验的人,但在以后更多。
直到现在我所写的大部分都可以通过简单的货架解决方案轻松实现,商业产品存在允许攻击者设置“自杀”无人机,近乎没有努力,只需购买预先制造的飞行平台几乎没有完全修改。如果无人机用于智力收集目的,甚至更容易。商业平台可以很容易地“编程”(无需代码,只需鼠标点击或指点)从一个位置起飞,飞行一条非常精确的飞行路径,在某些特定位置使用高分辨率相机拍摄照片,并且自动返回“家”,所有都没有发出单个无线电信号。
但是......只是冰山一角。自2000年代初以来,越来越易于编程的微控制器的扩散使得“开源战争”的世界令人印象深刻地令人难以理解,令人担忧的能力而不是过去。一些核心,主要是开源技术对于这种“轻松”来实现能力至关重要。
现代,便宜且易于编程微控制器的起源,特别是对于我们正在讨论的用途,可以追溯到90年代初的2000年初与乐高的思维风暴(来自MIT项目 - 添加链接)项目的项目允许孩子们设计和编程机器人的目标,具有不同程度的复杂性。
微控制器基本上是一个小的“计算机”,可以编程,并容易地与传感器,电机和执行器接口。在Lego Mindstorm平台的核心中,有一个微控制器和一个非常简单的使用编程接口,它使用简单的拖放解决方案来定义机器人行为。
该概念很快发达于更开放和先进的解决方案,如Arduino,它采用廉价的硬件,节能设计和开放式开发平台,与现在有数以万计的开发人员的社区贡献了知识,代码,想法和设计。
该平台的初始目标是允许快速的原型设计解决方案,现代硬件设计师可以用于尝试其项目的先进功能,然后可以将其投入商业产品(制作一个简单的例子,2007年我可以使用Arduino设计一个自动化的植物浇水系统,它将使用简单的湿度传感器与植物下方的地球接触并指挥伺服电机,一旦湿度水平下降一定的阈值。一旦我有工作,我就可以带来设计用更专用和高效的硬件生产。
平台的多功能性和它的开放性,迅速导致了一个巨大的“思想家”社区,它将使用Arduino获得非常广泛的DIY设计。
由于类似的微控制器,由于智能手机(陀螺仪,加速度计,数字指南线,GPS等),再加上昂贵而独家的传感器变得非常实惠,我们开始看到将使用微控制器与多个传感器集成数据的多个传感器和将一组发动机的功率输出平衡到所需的飞行行为中。在与传感器的数据集成并使用它来驱动引擎和执行器的类似车辆的核心,这是一个被称为PID控制器的PID控制器,这是一个相当古老的概念,可以适应软件实现,并授予直接和直观的方式计算正确的输入,以便给发动机,伺服等。
PID控制器的使用和正确实现是控制所有类型的车辆,独立于移动类型,定为来自姿态传感器的一些相干输入数据,PID将输出正确的值以传递给任何推进或转向系统设计雇用,成为Diy巡航导弹火星的潜艇。
DIY RC飞行社区跳上了这一点,并在2010年初推出了完全开源平台,如“ardupilot”,逐渐允许曾经非常复杂的(并且因此,通常是GOV保留的)功能集成到定制飞行中的功能,驾驶甚至水下移动设计。
您今天可以(现在已经是如此),使用您选择的组件以高度可自定义的行为构建您自己的“无人机”,所有的组件都没有超过一些拖放操作。然后,Ardupilot和类似解决方案的开源性质允许更多狡猾的设计师将自己的代码和功能集成到他们的创作中,同时仍可利用强大和多功能的基础平台。
便宜且易于使用的微控制器作为Arduino我介绍的上面是同时非常强大但也非常有限。它们的功能强大,因为它们可以相对容易地带来的功能,但它们受到非常基本的处理,有限的记忆和一般计算能力的限制。一个Arduino Micro Controller,甚至是一系列它们,将在处理大量数据时具有非常困难的时间,它们非常适合在给定基本定位和态度数据的情况下飞行车辆,但是旁边是无用的,因为更高级的任务作为实时图像分析,必须处理数百万像素,每秒多次。
所以…。对单板电脑打招呼!在过去的十年中,我们已经看到了平台的介绍和传播,如覆盆子PI,这对所有人都影响了一个非常小,便宜但有能力的计算机。再一次,在控制它的硬件和软件后面的开源设计(在这种情况下全面的,基于Linux的,操作系统)导致广泛的采用和大型和活跃的社区不断尝试新的设计,试验和详细说明每一步他们与平台的工作。基于Linux,它非常容易到Raspberry PI流行的开源工具,软件,框架和库,这些工具,用于个人计算机,通常来自学术界。
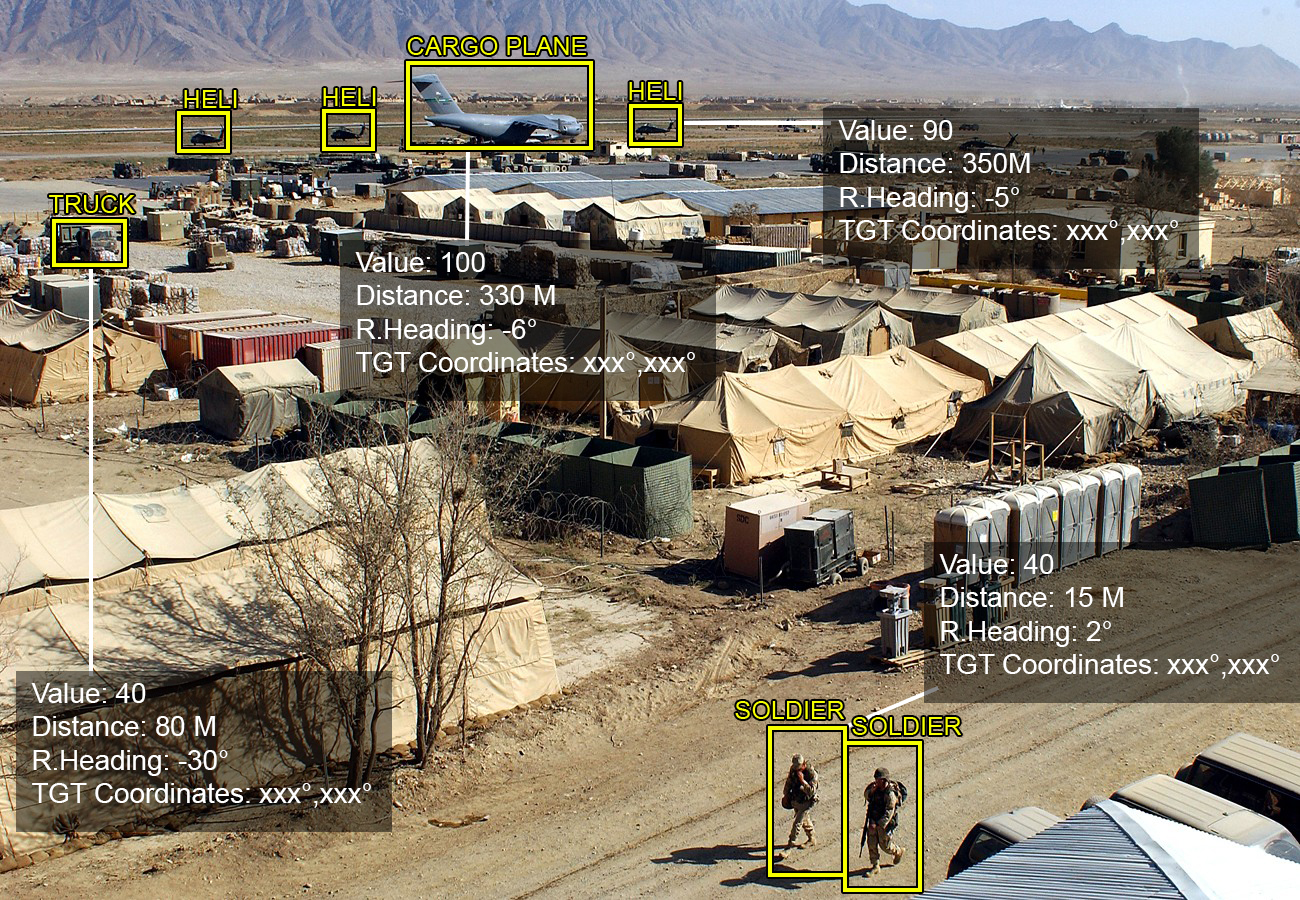
好的,但我需要覆盆子?根据文章的主题,覆盆子和类似的单板电脑(Raspberry是一个流行的例子,英特尔,NVIDIA和许多其他公司提供更强大的解决方案,专门针对计算机愿景优化)可用于给我们的重要额外功能授予我们的“开放酸
......