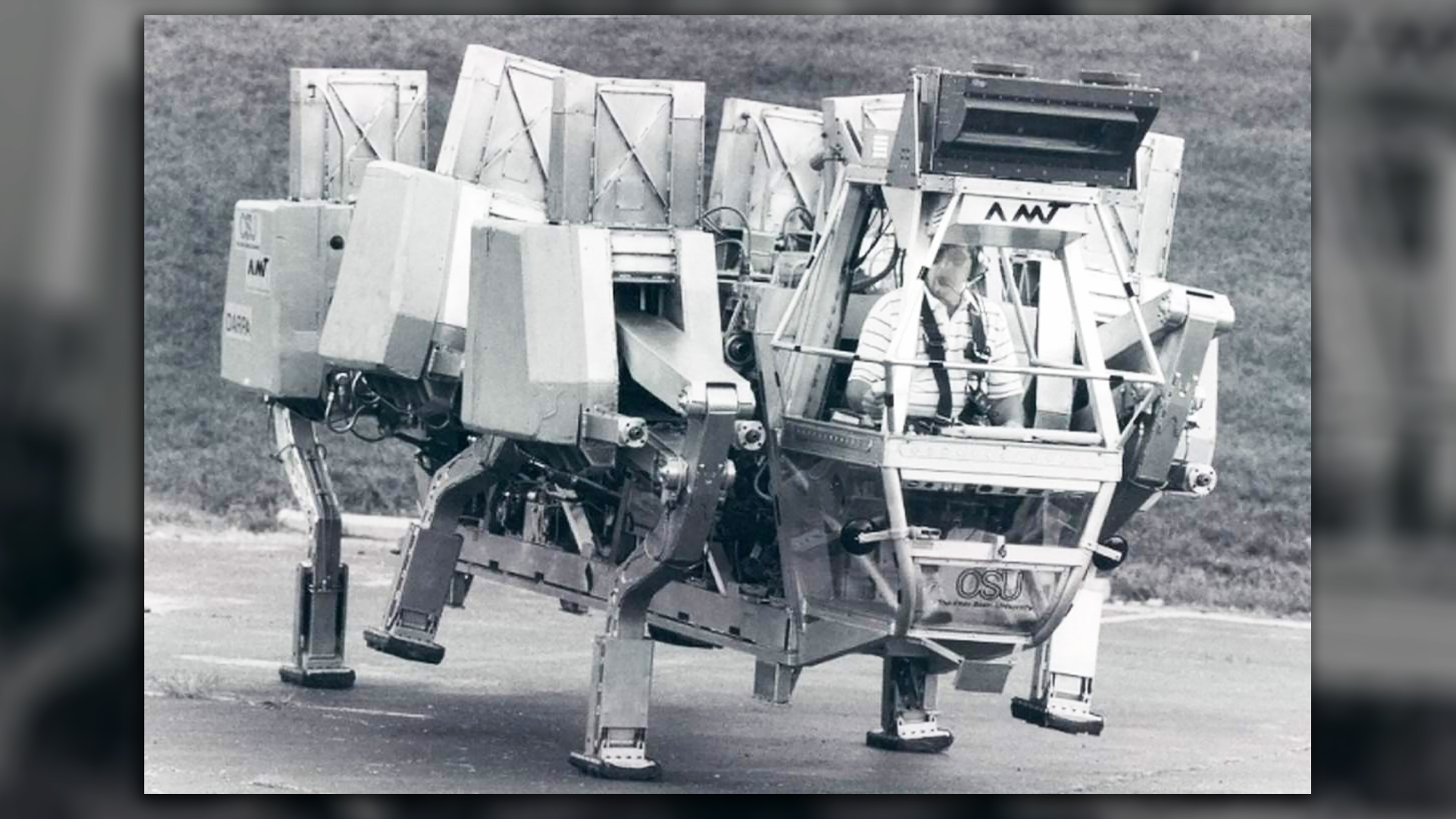
美国军队在20世纪80年代花费数百万美元开发巨型六条腿步行卡车
美国军队喜欢它的玩具,而且花了很多钱买它们,所以当它不能把昂贵的小玩意儿带到它想去的任何地方时,它自然会感到失望。在20世纪80年代,陆军计算出地球上大约一半的陆地是传统的轮式或履带式车辆无法通过的,也就是所谓的。它的整个地面舰队。这显然是个问题,所以它与俄亥俄州立大学(Ohio State University)和一些外部承包商合作开发了自适应悬架车辆:一种卡车大小的六条腿的液压机器人,由一个单独的操作员操纵。
尽管它非常复杂,也同样缓慢,但它是一次成功的尝试,将人工腿部运动从科幻小说的页面上带入现实,比波士顿动力公司(Boston Dynamics)领先了整整20年,成为令人毛骨悚然的机械化动物游戏。
ASV项目由国防高级研究计划局(DARPA)资助,于1981年1月在俄亥俄州立大学开始实施。在罗伯特·麦基(Robert McGhee)和肯尼斯·沃尔德隆(Kenneth Waldron)-两位大学教授-的领导下,这台机器在接下来的九年里被开发出来。与之前的其他更粗糙的实验不同,俄亥俄州立大学的机器将包含17台计算机,以确保车辆的操作员在管理ASV六条腿的每一步一天后,不会筋疲力尽。
请记住,按照今天的标准,这些计算机非常脆弱。你在车辆金属肩部上方看到的那些巨大的长方形盒子不是某种液压蓄水器,它们每个都容纳着六台控制腿部的8位英特尔计算机中的一台。这六台8位计算机分别控制着两条腿的六台英特尔86/30和128K;128K;128K;128K;128位计算机中的一台。
其余的11人完成了各种其他任务,比如控制驾驶舱内的CRT显示器,分析从腿部和脚部的压力传感器收集的所有数据,以及根据安装在驾驶室上方的128x128像素扫描测距仪的数据确定机器的最佳立足点。然后,所有这些数据都由车辆的操作软件解释--用Pascal编写,由15万行源代码组成--让自动潜水器漫步。
这就是计算机化的元素结束的地方,而机械和人的元素开始的地方。这辆车被描述为有更多的监督,而不是真正的驾驶。操作员用键盘和操纵杆指示ASV去哪里,然后它就朝那个方向出发。一些文献暗示,最终目标是让这台机器实现自主,然而,俄亥俄州立大学的团队显然受到当时处理能力的限制--尽管他们每年从美国国防部高级研究计划局(DARPA)获得100万美元的资金来资助该项目。
当然,这笔钱不仅仅是用在车辆的电脑上,因为让ASV行走的机械系统也同样复杂。
这台机器的核心是一台900cc的摩托车发动机,最大输出功率为91马力,但它不仅仅是为一个巨大的液压泵提供动力。在发动机和18个变量泵之间--是的,18个--驱动着车辆的液压缸是一个100磅重的飞轮。它的转速高达每分钟12,000转,可以储存0.25千瓦时的能量。这意味着它可以在一个小时内输出250瓦的功率-大约三分之一马力-或者在更短的时间内输出更大的功率。
这是有用的,因为ASV的18个泵是由一个相当复杂的系统驱动的。发动机通过齿形皮带将动力从输出轴输送到三个独立的传动轴。它们跑完了整辆车的全长,进而通过更多的齿形皮带将动力传递给水泵-每条腿三个。为了在这个高摩擦系统中完成特别高能量的动作,车辆需要比发动机所能产生的更多的能量。
这就是储存在飞轮中的能量被利用的时候。飞轮还允许车辆在ASV停止时从泵中恢复一些能量-就像混合动力汽车的再生制动一样-并确保在突然断电的情况下平稳关闭。
多亏了这个复杂的驾驶系统,这辆车可以以每小时8英里的最高速度行走,尽管它说这样的速度让骑行变得不和谐。巡航速度接近每小时4英里。它还可以做更多的事情,而不仅仅是走路和跑步。它有六种不同的驱动模式,包括实用(一种诊断模式)、精确落地、近距离机动、跟随领先者、地形跟随和巡航/冲刺。
也就是说,缓慢的巡航速度限制了ASV的实用性。这一速度不仅受到操作员可以处理的推撞量的限制,还受到其重量的限制。它重达5952磅,很重。它也只能携带485磅的持续有效载荷,这在官方看来是不够的。
最后,它有17英尺长,7.9英尺宽,9.8英尺高--对于运载这么小的有效载荷来说,这是一个很大的交通工具。尽管能够跨过6.9英尺高的垂直障碍物,穿越23英尺宽的战壕,军方逐渐失去了兴趣,该项目于1990年被砍掉。
现在,如果你期待一场徒劳无功的追逐来找到这台机器的当前下落-就像我在我的红色涡轮大卡车故事中那样-你可能只会得到一台。消息来源表明机器的当前位置未知。它推测它只是打包在俄亥俄州立大学校园的某个地方,然而,我不确定。我已经联系了俄亥俄大学的工程系,试图收集更多的信息。
在那之前,我们所能做的就是惊叹于这台巨大的机器,它用六条昆虫般的腿笨拙地走来走去。像波士顿动力公司这样的公司花了很长时间才真正将腿部运动变成现实,但即使是那些机器也还不能载人。尽管我很想装上马鞍,骑上它的“大狗”机器人之一,但我恐怕目前还不在考虑之列。(这句话的意思是:“我很想骑上它的马鞍,骑上它的一只大狗机器人,但恐怕它现在还不在纸牌上。)”不过,我会继续问的。


